ボルト製造業様よりご依頼を頂き、バラ積み容器からのピッキング作業に対して自動化提案を行った事例です。
既設専用機の更新に伴い、段取り変更のない装置に変えたいとの要望に対して弊社より既設専用機とは異なる方式でのご提案させていただきました。
従来はパーツフィーダを使っていましたが、ボルトのサイズ切替によってはボウルの型替え変更が必要だった為、複数のボウルの保管場所の確保や交換作業に時間が掛かるという問題がありました。
この問題を解決するため、段取り変更の不要な自動設備のご提案をさせていただきました。
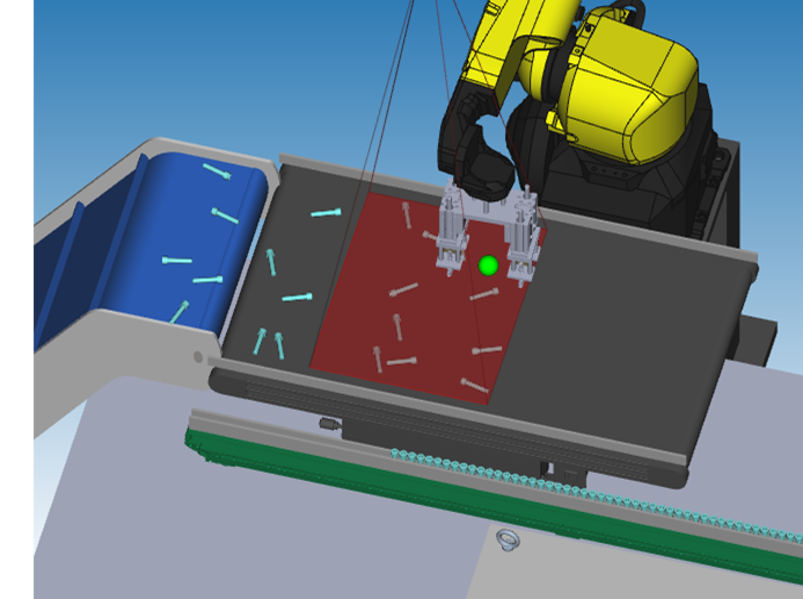
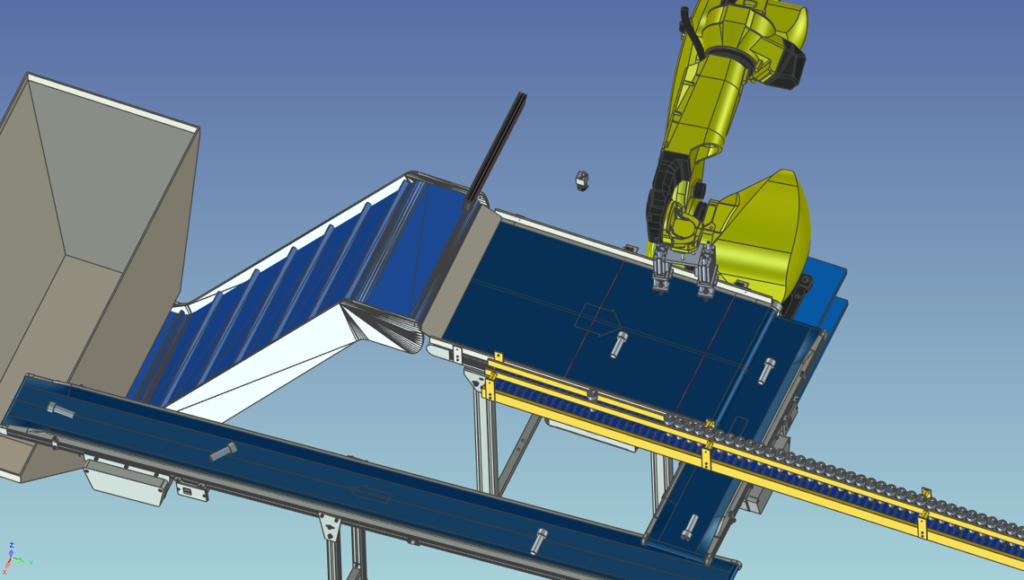
ホッパー内のボルトはコンベアによりロボットエリアまで搬送されます。
ロボットエリアまで搬送されたボルトはビジョンカメラにより向きや位置を認識してロボットがピッキングを行います。
ボルトサイズが変わってもビジョンの認識によって常に最適な位置でボルトを取り出します。
ご提案時の事前検証としてビジョンで多品種のボルトを認識できるかどうかの課題がありましたが、ボルトをお借りして事前テストを行い、技術的リスクをクリアしたうえでご提案させていただきました。
工場ライン 自動化構築Naviを運営するニンバリは、当事例のように、自動化機器の提案・設計・製造を行っており、2Dビジョンを使ったサンプルテストも弊社で行っております。
また、電気・制御設計も自社にて行っておりますので、装置全体の最適化が可能となります。
自動化装置や自動化ラインのアウトソーシングを検討中の皆様、お気軽にご相談ください。
